Получите доступ к полному тексту материала
Наука и технологии
6 марта 2020
Улитка гироскопических инноваций
Инновационные циклы в гироскопостроении длятся сорок-пятьдесят лет, причем смена одного на другой происходит только после серьезного прорыва в физике и технологиях. По гироскопам можно мерять ход научных революций
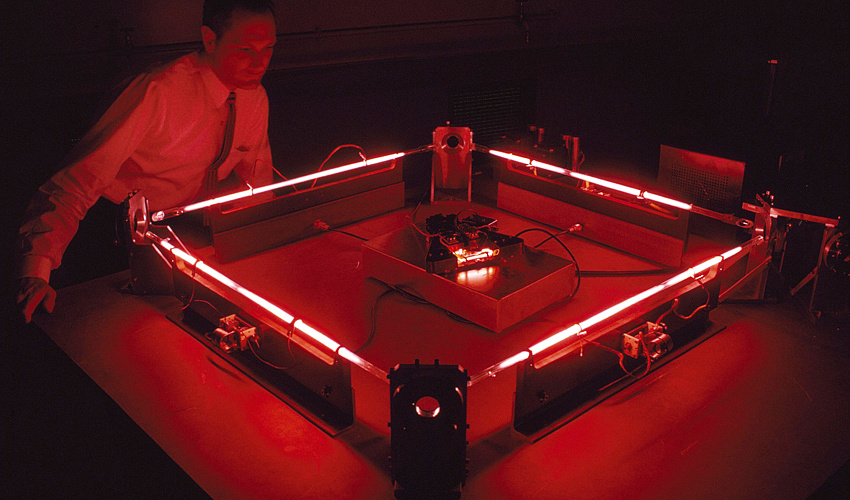
Действующий макет одного из первых лазерных гироскопов (Нью-Йорк, 1966 г.)
Фотография: gettyimages.ru
Инерциальные системы навигации — вершина развития систем навигации с древнейших времен. В основе инерциальной навигации лежат простые соображения: измеряя ускорение движения, можно путем его интегрирования вычислять скорость, а интегрированием скорости можно определять текущее местоположение (координаты) движущегося объекта.
Ускорение — векторная величина, которая имеет не только численное значение, но и направление. Следовательно, система датчиков, определяющая ускорение, должна измерять и его величину, и его направление. Величину ускорения определяет специальный прибор — акселерометр, который был изобретен в конце XIX века для установки в автомобилях и паровозах с целью контроля скорости их движения. Информацию о направлении движения объекта дают гироскопы, обеспечивающие опорную систему координат для акселерометров.
Еще по теме:
23.06.2026
Новый катализатор с «перевернутой» структурой позволит получать ценные для медицины и промышленности амины при комнатной...
19.06.2026
У людей, мало-мальски знакомых со спецтехникой, аббревиатура JCB вызывает устойчивые ассоциации с обширным семейством эк...
08.06.2026
Томские ученые впервые экспериментально показали, как внешнее электрическое поле разной силы влияет на структуру и темпе...
05.06.2026
6 июня 1889 года в Киеве в многодетной семье известного психиатра родился выдающийся российский и американски...
Наверх